MJRoBot termina em 3o. lugar no concurso: Remote Control Contest 2017 promovido pelo Instructables.com, o maior site Maker do mundo!
O tutorial ganhador, foi sobre os sambas, quero dizer, sobre minhas experiencias com o pequeno robô Cozmo (é que sambei um pouquinho para entender como programar o rapaz ;-)!
Cozmo é muito mais que um brinquedo, é uma grande ferramenta didática tanto para crianças como adultos. Cozmo pode ser programado tanto por uma linguagem parecida ao Scratch quanto por Python. Daí, minha idéia de interagir o robozinho com o Raspberry Pi.
O tutorial completo pode ser encontrado aqui no site:
Em meu último tutorial: Controle ativado por voz com Android e NodeMCU, exploramos como desenvolver nossa própria App em um smartphone Android para controlar localmente (usando botões ou voz) dispositivos domésticos inteligentes. Que tal agora, em vez de dispositivos domésticos controlarmos motores? E melhor ainda, que tal ter esses motores movendo um robô? Pois isso, é exatamente o que desenvolveremos aqui, um robô controlado por voz via WiFi e utilizando como microcontrolador nosso velho amigo, o NodeMCU!
O diagrama de blocos abaixo nos dá uma geral sobre o projeto que desenvolveremos aqui:
e o filme nos mostra como ficará o projeto:
Por favor, considere que um de meus motores estava com muito pouco torque. Apesar de o resultado parecer estranho, o projeto funciona a contento. Assim que mudar o motor, atualizarei o vídeo. Obrigado.
Como um dos vencedores do concurso “Robotics 2016” do Instructables, recebi como prêmio da empresa iRobot, um robô aspirador Roomba Create2. Neste post, vou contar um pouco de minhas primeiras aventuras com o garoto!
Este é um grande exemplo do fascinante mundo do IoT, onde o que aprenderemos com o robô, poderá ser utilizado para controlar qualquer coisa pela internet!
Neste projeto, vamos desarmar um carrinho de controle remoto, substituindo sua eletrônica por um microprocessador Arduino controlado por dispositivo Android.
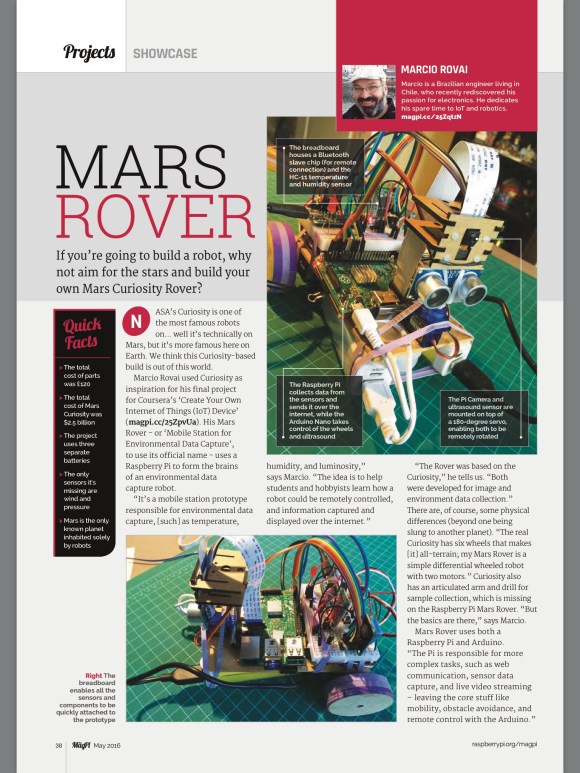
A edição de maio da revista britânica MagPi publicou uma matéria muito legal sobre meu Projeto “Mars Rover Tupiniquin”. Para quem não conhece, a MagPi é a revista oficial do RapsberryPi. Você pode baixar grátis as edições da revista em PDF.
Esta é a segunda e última parte de um projeto mais complexo, que explora a potencialidade de um robô seguidor de linha. Nesta etapa, aplicaremos conceitos de inteligência artificial na exploração de labirintos, implementando algoritmos que nos ajudarão a encontrar o caminho da saída mais curto e rápido.
O objetivo desse tutorial é desenvolver passo a passo um projeto para o controle e programação de um braço robótico, simulando as funções básicas de um robô industrial.
Especificações:
O robô deverá ter duas funções básicas:
Programa: gravar posições do braço em 3 dimensões
Run: executar o programa de trabalho (ou seja, executar em sequencia as posições gravadas na etapa de programa.
O robô executará o programa até que o comando de “abortar” seja utilizado.
O projeto deverá controlar robots de 3 ou 4 DOF (“Degrees of Freedom”).
O robô deverá ser controlado em modo “local” e “remoto” (via celular)
Durante o programa se poderá mudar o controle de “local” a “remoto” e vice-e-versa.
Deverá possuir sinalização tanto visual (LEDS e display) quanto sonora
Deverá possuir função de alarme acionado remotamente.
O projeto:
O diagrama abaixo mostra o “Bill of Material” que será utilizado no projeto:
Para o projeto, optarei pelo Arduino MEGA para não ter que me preocupar com o número de portas I/Os. O UNO funcionaria sem problemas, mas se deveria utilizar algum método de expansão de portas. Existem várias opções que podem ser facilmente encontradas na internet, como um decodificador 74138 por exemplo (veja o site: “Expandindo os I/Os do Arduino”).
A app Android utilizado para o “modo remoto”, foi desenvolvida utilizando-se a ferramenta MIT appinventor2, uma plataforma tão poderosa quanto simples para esse tipo de app baseado no Android. No futuro pretendo explorar a criação de apps desse tipo aqui no Blog. Por enquanto, a app está disponível para ser baixada gratuitamante na loja da Google: MJRoBot Arduino Arm Robot Control.
Os vídeos abaixo dão uma idéia de como deverá ficar o projeto final:
Primeiro protótipo sendo programado em “modo local”:
O robô programado de maneira remota via rede Bluetooth:
Nos próximos posts, detalharei os passos necessários para o desenvolvimento do projeto.
Como sempre, espero que este projeto ajude outras pessoas a encontrar seu caminho no apaixonante mundo da eletrônica, robótica e do IoT!
Em tempo: aproveito e deixo aqui um abraço para duas pessoas muito queridas, meu tio Ítalo que já não está aqui entre nós, que além de me ensinar a jogar Xadrez quando garoto, me deixou de presente essas peças que utilizei no vídeo. O outro abraço vai para o meu sogro Mathias, que muito carinhosamente presenteou-me com o tabuleiro e com as peças do jogo que haviam se perdido com o tempo (tudo feito por ele).
Uma rede sem fio local (e pessoal) porreta é sem dúvida a Bluetooth (BT). Hoje em nosso dia-a-dia é comum encontrar-nos com celulares, aparelhos de som, cameras, etc., entrelaçados com a ajuda da famosa “luzinha azul”
No mundo do IoT e da automação em geral, é muito comum deparar-nos com controles remotos via celulares utilizando tecnologia BT. Isso é devido a 2 componentes básicos mas muito importantes:
Plataforma de desenvolvimento para OS ANDROID
Módulos BT baratos e acessíveis (Como por exemplo o HC-06)
Neste tutorial, vou desenvolver algumas idéias de como controlar as saídas de um Arduíno através de um celular de maneira a mover um Robot, acionar lâmpadas em uma casa, etc.
No mercado é comum encontrar módulos de BT 3.0 “Master-Slave” como o HC-05 e “Slaves” como o HC-06. Já mais recentemente, apareceram os HC-08 e HC-10 que trabalham com tecnologia BT 4.0 ou BLE (“Bluetooth Low Energy”). Os módulos BLE são os únicos que podem ser conectados a um Iphone, pois infelizmente a Apple não fornece suporte a ao BT 3.0.
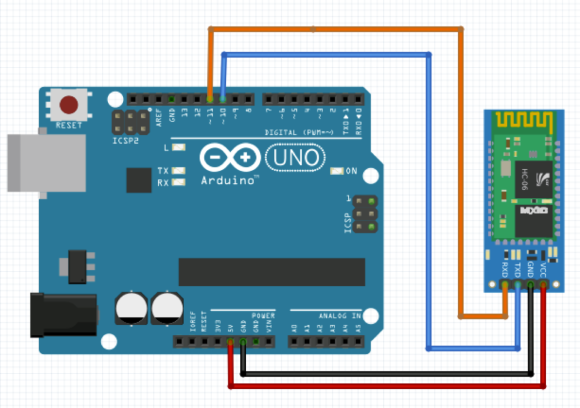
Para os projetos discutidos aqui, usarei um HC-06 que é bem popular e barato (Bye, bye, Iphone, vamos de Android!). O Módulo é alimentado com 5V o que faz com que ele seja facilmente conectado a um Arduino
UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.
Na prática, o HC-06 deve ser ligado diretamente aos pinos 0 e 1 do Arduino (Serial):
HC06-Tx ao Arduino pin 0 (Rx)
HC06-Rx ao Arduino pin 1 (Tx)
Ao se usar a entrada serial por HW do UNO é muito importante lembrar-se que o HC-06 não pode estar fisicamente conectado aos pinos 0 e 1 durante a carga do programa, isso porque o USB também usa essa mesma serial. Uma maneira simples de se contornar esse probleminha (se seu projeto não utiliza muitos GPIOs do UNO) é usar uma porta serial por SW através da library SoftwareSerial (a mesma que usamos no caso do ESP8266). Em nosso caso aqui, usaremos os pinos 10 e 11 do UNO (Tx, Rx respectivamente).
No meu último post, comentei que o curso que fiz através da plataforma EDX me ajudou a re-descobrir o mundo da eletrônica. De lá para cá, tenho nas horas vagas procurado fazer alguns cursos tanto do EDX quanto do COURSERA. Essas plataformas são a ponta de lança para que grandes universidades ou empresas possam propiciar cursos on-line. Em geral a qualidade é muito boa e a profundidade depende da instituição ou do tema. Como regra geral, eu diria que os cursos do EDX são mais complexos, profundos e necessitam bastante dedicação e tempo. Já os do COURSERA, são mais superficiais e rápidos. Esses cursos são conhecidos como MOOC (Massive Open Online Course) e seguramente vão transformar a educação como a conhecemos hoje.
Existem tanto cursos “isolados” sobre um determinado tema como outros que são “Especializações”, ou seja um conjunto de cursos (em geral 5 + um projeto final) que também podem ser feitos individualmente. Todos os cursos podem ser feitos sem certificado final (gratuitos) ou com direito a certificado (em média, uns USD50/curso).
Aqui vão algumas sugestões de cursos que estão abertos no momento, outros que já fecharam, mas ainda disponibilizam conteúdos e alguns que ainda estão por vir:














 Em tempo: aproveito e deixo aqui um abraço para duas pessoas muito queridas, meu tio Ítalo que já não está aqui entre nós, que além de me ensinar a jogar Xadrez quando garoto, me deixou de presente essas peças que utilizei no vídeo. O outro abraço vai para o meu sogro Mathias, que muito carinhosamente presenteou-me com o tabuleiro e com as peças do jogo que haviam se perdido com o tempo (tudo feito por ele).
Em tempo: aproveito e deixo aqui um abraço para duas pessoas muito queridas, meu tio Ítalo que já não está aqui entre nós, que além de me ensinar a jogar Xadrez quando garoto, me deixou de presente essas peças que utilizei no vídeo. O outro abraço vai para o meu sogro Mathias, que muito carinhosamente presenteou-me com o tabuleiro e com as peças do jogo que haviam se perdido com o tempo (tudo feito por ele).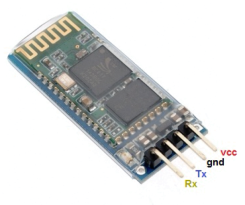 UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.
UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.