Acaba de sair do forno o primeiro livro da série “Tutoriais MJRoBot”, o “ArduFarmBot: Automatizando uma horta de tomates com a ajuda da Internet das Coisas – IoT”.
O livro pode ser adquirido nas lojas do Kindle na Amazon:

Por favor divulguem o livro e se gostaram, deixem um comentário na página da: Amazon.com.br
Caso encontrem erros ou tenham sugestões, por favor usem a area de mensagens aqui no blog, que procurarei corrigir nas próximas edições.
O livro usa o controlador eletrônico “ArduFarmBot” como base para o aprendizado de como se trabalhar tanto em HW quanto em SW, com: a) Displays do tipo LCD e OLED; b) LEDs e botões; c) Acionamento de bombas e lâmpadas via relés e d) Leitura de sensores tais como: DHT22 (temperatura e umidade relativa do ar), DS18B20 (temperatura do solo), YL69 (umidade do solo) e LDR (luminosidade).
Todas as principais etapas dos projetos são detalhadamente documentadas através de textos explicativos, diagramas de blocos, fotos coloridas de alta resolução, diagramas elétricos utilizando-se do aplicativo “Fritzing”, códigos completos armazenados no “GitHub” e vídeos do “YouTube”.
No livro, são desenvolvidas duas versões do controlador eletrônico “ArduFarmBot”, que a partir da captura de dados provenientes de uma horta de tomates, tais como temperatura do ar e solo, umidade relativa do ar, umidade do solo e luminosidade, decidem autonomamente a quantidade certa (e quando) uma plantação deve receber calor e água. O ArduFarmBot também permite a intervenção manual, tanto em forma local quanto remota via Internet, a fim de controlar o acionamento de uma bomba de água e de uma lâmpada elétrica, esta última para ser usada na geração de calor para as plantas.
O livro está dividido em 3 partes.
Na primeira parte, a partir do “Arduino Nano” de desenvolve uma versão tanto manual operada por botões, quanto automática do “ArduFarmBot”.

Na segunda parte, se aprofunda no projeto da automação e introduz a operação remota através da criação de uma página na internet. O “ESP8266-01” é utilizado para a conexão “Wifi”, enviando dados para o serviço especializado em IoT, “ThingSpeak.com“.

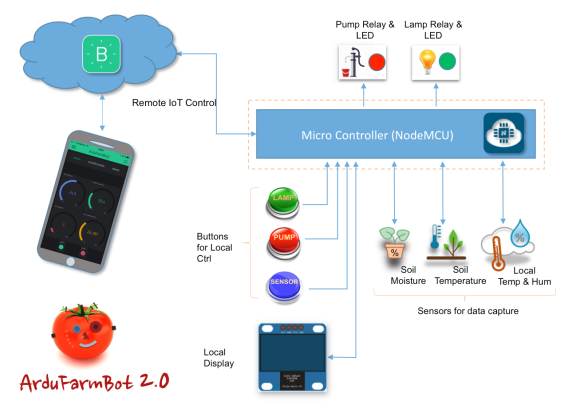
Na terceira parte, uma segunda versão do “ArduFarmBot” é desenvolvida, introduzindo o “NodeMCU ESP8266-12E”, um poderoso e versátil dispositivo para projetos em IoT, que substitui de forma integrada tanto o “Arduino Nano” quanto o “ESP8266-01”, utilizados nas partes anteriores do livro. Nesta última, se explora também uma nova plataforma de serviços do universo IoT, o “Blynk”.

Espero que gostem! E se preparem para o Tutoriais MJRoBot 2: “Brincando com robôs”.
Não deixem de visitar e seguir minha página: MJRoBot.org no Facebook
Saludos desde el sur del mundo!
Nos vemos em meu próximo post!
Obrigado e um abração,
Marcelo