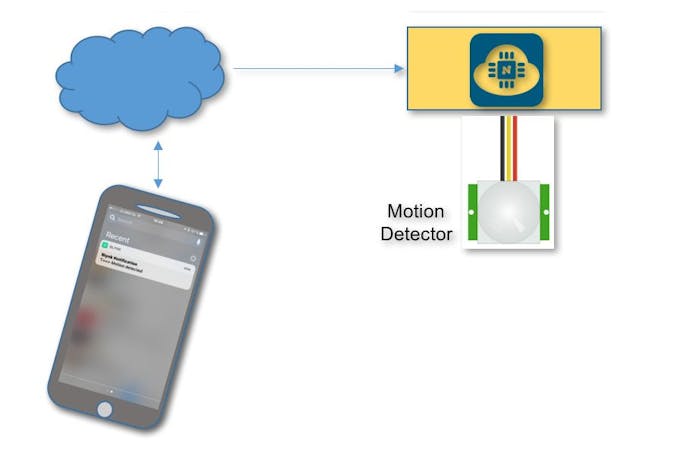
Simples tutorial para demonstrar a facilidade de implementação de um projeto do tipo “Internet das Coisas” (IoT) com o NodeMCU e o Blynk.Toda vez que um movimento é detectado pelo sensor, uma mensagem fornecida pelo aplicativo Blynk é enviada para um smartphone.