Uma rede sem fio local (e pessoal) porreta é sem dúvida a Bluetooth (BT). Hoje em nosso dia-a-dia é comum encontrar-nos com celulares, aparelhos de som, cameras, etc., entrelaçados com a ajuda da famosa “luzinha azul”
No mundo do IoT e da automação em geral, é muito comum deparar-nos com controles remotos via celulares utilizando tecnologia BT. Isso é devido a 2 componentes básicos mas muito importantes:
- Plataforma de desenvolvimento para OS ANDROID
- Módulos BT baratos e acessíveis (Como por exemplo o HC-06)
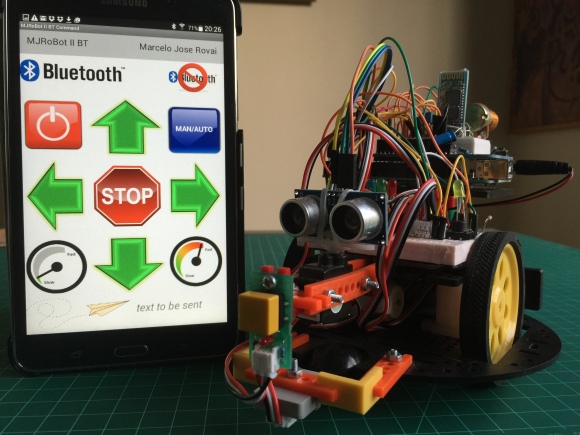
Neste tutorial, vou desenvolver algumas idéias de como controlar as saídas de um Arduíno através de um celular de maneira a mover um Robot, acionar lâmpadas em uma casa, etc.
No mercado é comum encontrar módulos de BT 3.0 “Master-Slave” como o HC-05 e “Slaves” como o HC-06. Já mais recentemente, apareceram os HC-08 e HC-10 que trabalham com tecnologia BT 4.0 ou BLE (“Bluetooth Low Energy”). Os módulos BLE são os únicos que podem ser conectados a um Iphone, pois infelizmente a Apple não fornece suporte a ao BT 3.0.
Para os projetos discutidos aqui, usarei um HC-06 que é bem popular e barato (Bye, bye, Iphone, vamos de Android!). O Módulo é alimentado com 5V o que faz com que ele seja facilmente conectado a um Arduino
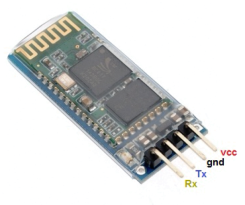 UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.
UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.
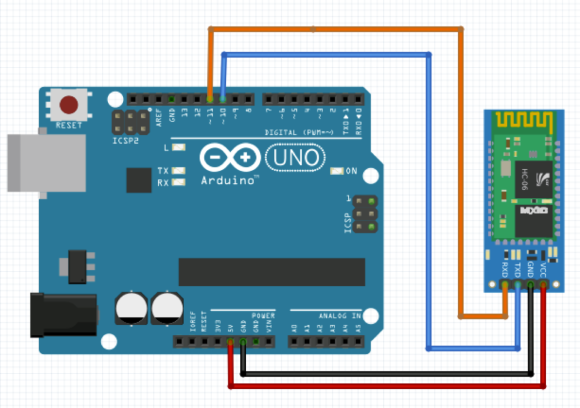
Na prática, o HC-06 deve ser ligado diretamente aos pinos 0 e 1 do Arduino (Serial):
- HC06-Tx ao Arduino pin 0 (Rx)
- HC06-Rx ao Arduino pin 1 (Tx)
Ao se usar a entrada serial por HW do UNO é muito importante lembrar-se que o HC-06 não pode estar fisicamente conectado aos pinos 0 e 1 durante a carga do programa, isso porque o USB também usa essa mesma serial. Uma maneira simples de se contornar esse probleminha (se seu projeto não utiliza muitos GPIOs do UNO) é usar uma porta serial por SW através da library SoftwareSerial (a mesma que usamos no caso do ESP8266). Em nosso caso aqui, usaremos os pinos 10 e 11 do UNO (Tx, Rx respectivamente).
Continue lendo…










 Com o rápido desenvolvimento do que chamamos hoje de “Internet of Things” ou simplesmente “IoT”, Arduinos, sensores, etc., estão cada vez mais ao alcance das mãos de curiosos, “hobbystas”, estudantes, profissionais, etc.
Com o rápido desenvolvimento do que chamamos hoje de “Internet of Things” ou simplesmente “IoT”, Arduinos, sensores, etc., estão cada vez mais ao alcance das mãos de curiosos, “hobbystas”, estudantes, profissionais, etc.



