Uma maneira simples de aprender eletrônica é usando o Raspberry Pi e sua biblioteca “GPIO Zero”. Com poucas linhas de código em Python, você poderá facilmente controlar atuadores, ler sensores, etc. Esta biblioteca foi criada por Ben Nuttall da Raspberry Pi Foundation, Dave Jones entre outros.
Aqui, neste rápido tutorial procurarei fornecer-lhes a base para a criação de circuitos simples, controlados pelo Raspberry Pi.
Para obter maiores detalhes, consulte o link abaixo:
GPIO Zero V 1.3.1 Documentation
Você poderá também fazer o download grátis de um livro completo fornecido pela reveista MagPi, que irá guiar-lo passo a passo no desenvolvimento de vários projetos utilisando-se da biblioteca GPIO Zero:
SIMPLE ELECTRONICS WITH GPIO ZERO
Neste tutorial, exploraremos os dispositivos de entrada (“sensores”):
- Botão
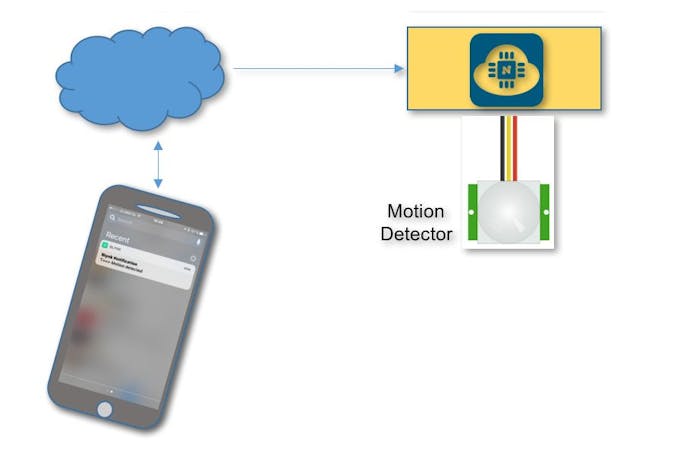
- Sensor de Detecção de Movimento
E como saída (“atuadores”):
- LED
- Buzzer
- Saída digital genérica (motor de passo)
Vamos lá, mãos a obra!