Learning Image Classification on edge devices (Android)

A few weeks ago, I wrote a tutorial exploring Image Classification, one of the most popular Machine Learning applications, deployed on a tiny device, the ESP32-CAM. It was an example of a TinyML application.
When we talk about TinyML, it immediately comes to our mind squeezed machine learning models running on embedded devices and consuming very low power. The characteristic of such applications is that we are running AI (or Machine Learning) at the Edge. But power is not always a concern, and so, we can find examples of edge machine learning applications running on more complex devices such as the Raspberry Pi (see my tutorial Exploring AI at the Edge) or even Smart Phones. In short, TinyML can be considered a subset of EdgeML applications. The below figure illustrates this statement:

This project will explore an Edge ML application Classifying Images on an Android device.
Developing Android (AI) Apps
Nowadays, developing Android apps using Java or the Kotlin language at Android Studio is not complicated, but you need to take tutorials to gain some domain. However, if you need to develop real professional applications, Laurence Moroney teaches an excellent course, available free at Coursera: Device-based Models with TensorFlow Lite.
But if you are not a developer, do not have the time, or only need a more straightforward app that can be quickly deployed, the MIT App Inventor should be your choice.
MIT App Inventor is an intuitive, visual programming environment that allows everyone – even children – to build fully functional apps for Android phones, iPhones, and Android/iOS tablets.
Only basic AI Applications are available with MIT App Inventor, such as Image and Sound classification, Pose Estimation, etc.
To start, optionally on this tutorial, available at the MIT App Inventor site, you can go step by step to create a general Image Classification App that will run on your Android device. In that project, the Mobilenet model was pre-trained with the ImageNet dataset, which 999 classes can be checked here. I left the project code (.aia) and the executable (.apk) of my version of this App in my GitHub.

But what we will explore here in this tutorial is how we can use our images to train a machine learning model to be deployed on an edge device, in this case, an Android tablet.
Continue lendo…






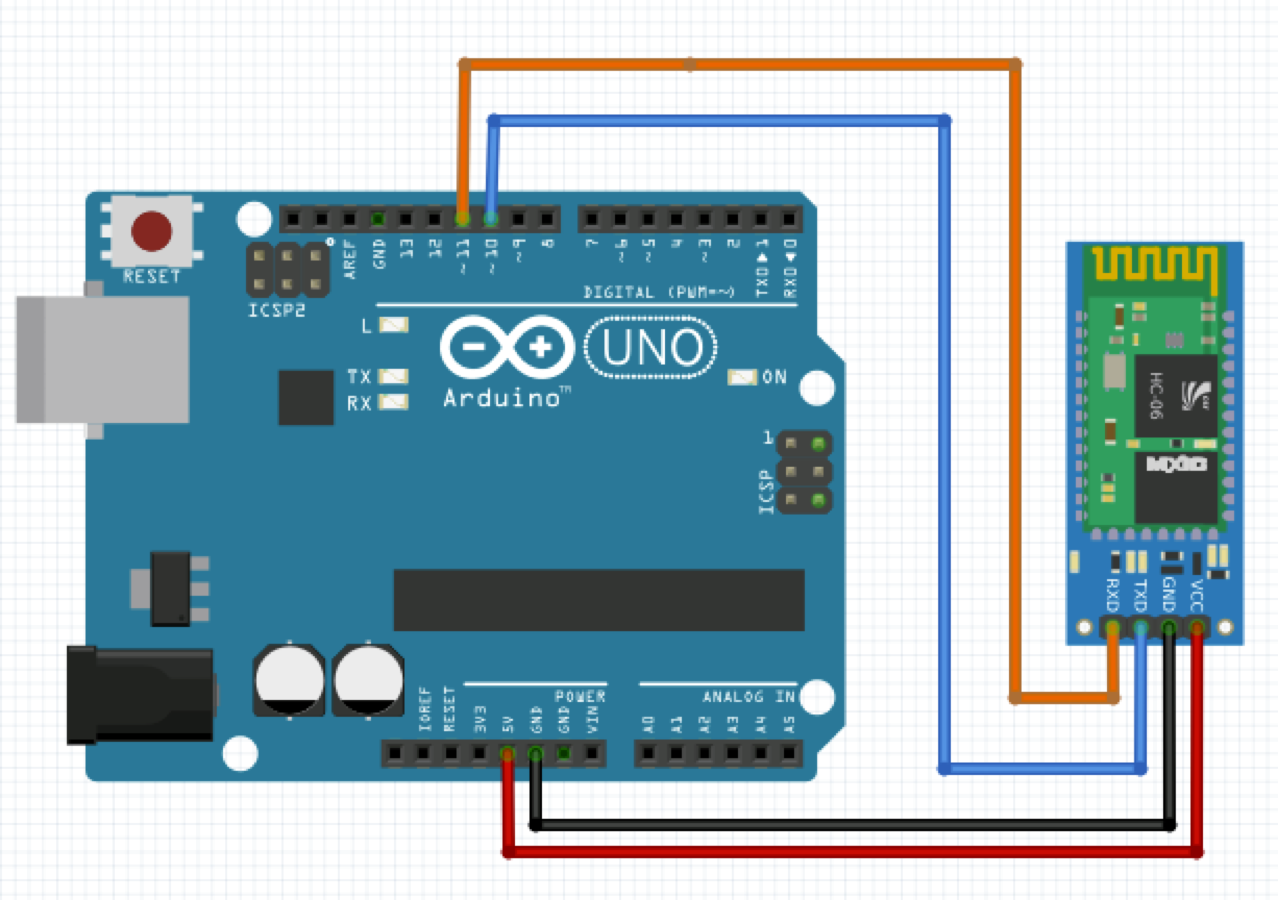
 UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.
UNO por exemplo, para receber e transmitir informações a outros dispositivos como um PC ou um telefone celular. Seus pinos de transmissão e recepção podem ser conectados diretamente ao UNO, não havendo a necessidade de se utilizar divisores de tensão como vimos no caso do ESP8266.