

This project shows how to emulate IoT devices and control them remotely by voice using Alexa.
Continue lendo...Arquivos para 30 30UTC November 30UTC 1999

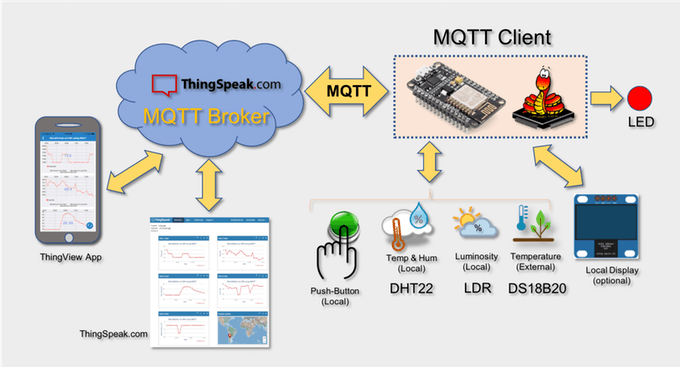
Com a ajuda do protocolo MQTT, enviaremos dados capturados de sensores, à um serviço de IoT, o ThingSpeak.com e a um aplicativo móvel, o Thingsview.

1. Introdução
Em meu post anterior, Programando MicroPython no ESP8266 , aprendemos como instalar e executar MicroPython em um dispositivo ESP (tanto o ESP8266 quanto o ESP32). Utilizando o Jupyter Notebook como ambiente de desenvolvimento, também aprendemos a ler a partir de sensores (Temperatura, Umidade e Luminosidade), utilizando vários protocolos de comunicação e métodos como: Analógico, Digital, 1-Wire e I2C, este último para exibir os dados capturados em um display do tipo OLED.
Neste novo tutorial, utilizando-se do protocolo MQTT, enviaremos os dados capturados, à um serviço the IoT, o ThingSpeak.com e para um aplicativo móvel, o Thingsview.
Aqui, uma visão geral reavaliando nosso projeto:


Vamos brincar com o MicroPython em um ESP8266 (ou ESP32) utilizando o um Jupyter Notebook. A idéia é obter dados de sensores, agindo em um mundo físico diretamente do Jupyter.

1. Introdução
Em um artigo anterior publicado no Medium, explorei como controlar um Raspberry Pi usando-se do Jupyter Notebook: Computação Física Usando o Jupyter Notebook.
Foi uma ótima experiência, e uma vez que o projeto funcionou muito bem, pensei:
“Que tal testar também o Jupyter Notebook em um ESP8266 (ou mesmo no ESP32) usando como linguagem o MicroPython?”
Como sabemos, o Jupyter Notebook é um aplicativo Web de código aberto que permite criar e compartilhar documentos que contêm código ativo, equações, visualizações e texto narrativo. Os usos incluem limpeza e transformação de dados, simulação numérica, modelagem estatística, visualização de dados, aprendizado de máquina e muito mais. Para o “muito mais”, exploraremos a “Computação Física”.
Até agora em meus projetos, explorei IoT e computação física utilizando o ESP8266–01, ESP8266–12E (NodeMCU) e o ESP32, programados pelo IDE do Arduino, utilizando-se de sua linguagem C / C ++. Mas outra ótima linguagem que pode ser usada na programação desses dispositivos é o MicroPython:
O MicroPython é uma implementação enxuta e eficiente da linguagem de programação Python 3 que inclui um pequeno subconjunto da biblioteca padrão do Python e é otimizada para rodar em microcontroladores e em ambientes restritos. O objetivo é ser tão compatível com o Python normal quanto possível para permitir que você transfira código com facilidade do desktop para um microcontrolador ou sistema embarcado.
Além disso, acho que usar o Jupyter Notebook para programar um dispositivo ESP usando o MicroPython pode ser uma ótima ferramenta para ensinar Computação Física para crianças e também ajudar os cientistas a acessar rapidamente o mundo real utilizando-se de sensores na aquisição de dados.
Isso é o que tentaremos realizar neste tutorial:
- Saída de um sinal digital para ligar / desligar um LED
- Ler uma entrada digital (através de um botão)
- Saída de um sinal PWM para o controle do brilho de um LED
- Controlar a posição de um servomotor utilizando-se de uma saída PWM
- Leitura de sinal analógico (luminosidade) usando um LDR
- Leitura de temperatura via bus 1-Wire (DS18B20)
- Leitura de temperatura e umidade (DHT22)
- Exibir dados usando um OLED via barramento I2C.

Nosso objetivo neste tutorial será basicamente coletar informações de uma unidade local, enviando-as à internet. Um usuário em qualquer parte do planeta, olhando estas informações, tomará decisões enviando comandos remotos à atuadores, os quais também estarão nesta unidade local. Qualquer sensor ou atuador poderia ser utilizado.

Este tutorial foi escrito a partir do que desenvolvi previamente envolvendo o ArduFarmBot e de meu projeto final apresentado para o curso: “Objetos inteligentes conectados”, promovido pelo CodeIOT, um projeto da Samsung em parceria com o Laboratório de Sistemas Integráveis Tecnológico.
A maioria de meu trabalho no campo do IoT utiliza o NodeMCU (ESP826612-E) e mais recentemente, o ESP32. Mas, acredito importante não esquecer de meus primeiros passos, onde começei a aprender IoT, usando-se de um simples Arduino UNO e do velho e bom ESP8266-01.
Decidi então, retornar a essa dupla, agora com um pouquinho mais de experiência e explorar novamente esses ótimos dispositivos, conectando-os à nuvem, usando-se do ThingSpeak.com como nosso “Web Service”.
Também exploraremos como controlar coisas remotamente desde qualquer lugar no mundo, utilizando-se de um aplicativo Android desenvolvido a partir do MIT AppInventor.

O “Centro do nosso projeto IoT” será o ThingSpeak.com. A unidade local (UNO / ESP-01) será a encarregada de capturar tanto os dados dos sensores quanto o status dos atuadores, enviando-os à Internet, ou seja, “escrevendo” em um canal específico do para o status da unidade local no ThingSpeak.com. A unidade local também receberá dados da internet, “lendo” canais específicos para os atuadores no ThingSpeak.com.
Um aplicativo Android também estará “lendo” esses dados de status guardados no ThingSpeak.com (Status Channel), exibindo-os para o usuário. Da mesma forma, o usuário, com base nesta informação de status, poderá enviar comandos para os atuadores, escrevendo commandos nos canais específicos para os atuadores no ThingSpeak.com (veja o diagrama de blocos acima para entender melhor o fluxo de dados).
O diagrama de blocos mostrado na próxima etapa nos dará uma visão geral do projeto final, onde como exemplo controlaremos a irrigação e o calor de uma plantação.

Meu tutorial publicado no site do Instructables.com: Alexa – NodeMCU: WeMo Emulation Made Simple, foi um dos vencedores na competição “Automation Contest 2017”.

Muito obrigado por todos os votos que o tutorial recebeu. É sempre uma grande honra saber que meu trabalho está sendo reconhecido e acima de tudo sendo executado em varias cantos do mundo! 😉
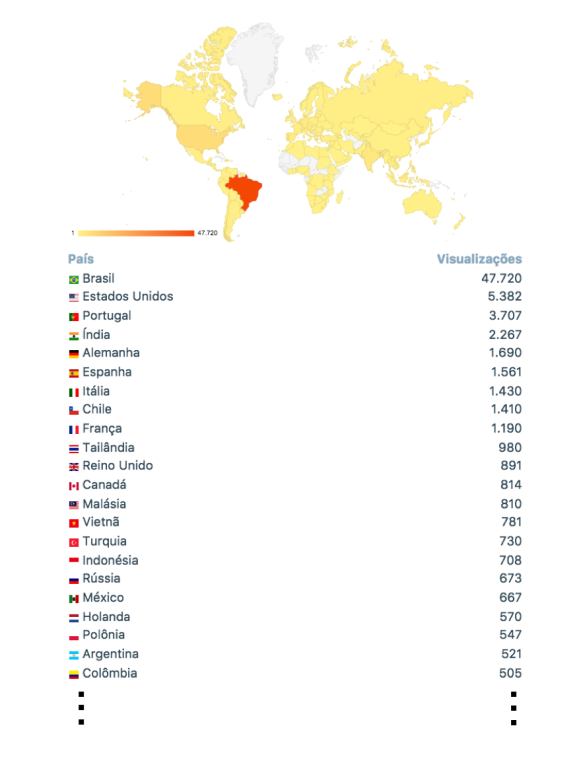
Fico muito feliz com este tipo de reconhecimento, pois mostra que estou no caminho certo com a decisão de escrever e compartilhar com a garotada e os velhos dinos, descobertas oriundas de minhas novas andanças pelos facinantes caminhos da eletrônica. A ideia era devolver ao mundo um pouquinho do muito que recebi, mas a cada vez que um garoto seja do Brasil, de Portugal, Índia, África, …. me escreve com uma dúvida ou agradecendo por um projeto meu, vejo que quem está recebendo algo mesmo, sou eu! 😉
Valeu moçada! Ah! O tutorial também pode ser visto em portugues aqui em meu blog:
Alexa – NodeMCU: Emulando um dispositivo WeMo

Outros premios recebidos por projetos publicados no site do Instructables:
Saludos desde el sur del mundo!
Até o próximo tutorial!
Obrigado
Marcelo


Alguns meses atrás, publiquei aqui um tutorial sobre o monitoramento de temperatura usando o DS18B20, um sensor digital que se comunica através de um barramento de um único fio (bus do tipo “1-wire”), sendo os dados enviados pela à internet com a ajuda de um módulo NodeMCU e o aplicativo Blynk:
O IoT feito simples: Monitorando a temperatura desde qualquer lugar
Mas o que passamos por cima naquele tutorial, foi uma das grandes vantagens desse tipo de sensor que é a possibilidade de coletar dados múltiplos, provenientes de vários sensores conectados ao mesmo barramento de 1 fio (“1-wire”). E agora é hora de também explorá-lo.

Vamos expandir o que foi desenvolvido no último tutorial, monitorando agora dois sensores DS18B20, configurados um em Celsius e outro em Fahrenheit (isto somente para explorar a biblioteca, poderiam ser os dois configurados para Celsius). Os dados serão enviados para uma aplicação Blynk, conforme mostra o diagrama de blocos acima.

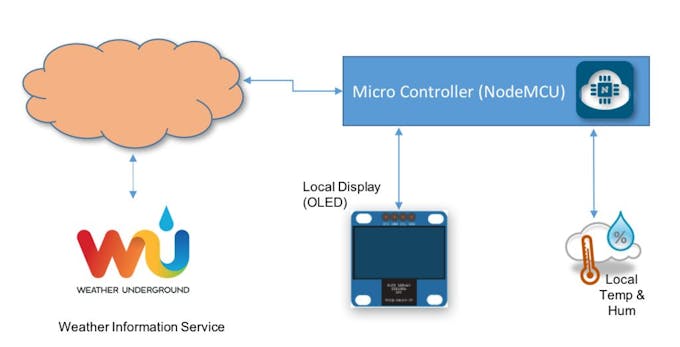
Continuemos nossa exploração pelo mundo do IoT, nas asas do NodeMCU! Neste tutorial, desenvolveremos uma estação meteorológica doméstica, onde se exibirá informações tais como temperatura e condições climáticas, tanto para o dia corrente quanto para os próximos 3 dias. Nossa estação também exibirá informações internas da casa, como temperatura e umidade relativa do ar.
O diagrama em blocos abaixo, nos dá uma visão geral sobre o projeto:
No vídeo abaixo, você pode ver como ficará o projeto final:

Acaba de sair do forno o primeiro livro da série “Tutoriais MJRoBot”, o “ArduFarmBot: Automatizando uma horta de tomates com a ajuda da Internet das Coisas – IoT”.
O livro pode ser adquirido nas lojas do Kindle na Amazon:

Por favor divulguem o livro e se gostaram, deixem um comentário na página da: Amazon.com.br
Caso encontrem erros ou tenham sugestões, por favor usem a area de mensagens aqui no blog, que procurarei corrigir nas próximas edições.
O livro usa o controlador eletrônico “ArduFarmBot” como base para o aprendizado de como se trabalhar tanto em HW quanto em SW, com: a) Displays do tipo LCD e OLED; b) LEDs e botões; c) Acionamento de bombas e lâmpadas via relés e d) Leitura de sensores tais como: DHT22 (temperatura e umidade relativa do ar), DS18B20 (temperatura do solo), YL69 (umidade do solo) e LDR (luminosidade).
Todas as principais etapas dos projetos são detalhadamente documentadas através de textos explicativos, diagramas de blocos, fotos coloridas de alta resolução, diagramas elétricos utilizando-se do aplicativo “Fritzing”, códigos completos armazenados no “GitHub” e vídeos do “YouTube”.
No livro, são desenvolvidas duas versões do controlador eletrônico “ArduFarmBot”, que a partir da captura de dados provenientes de uma horta de tomates, tais como temperatura do ar e solo, umidade relativa do ar, umidade do solo e luminosidade, decidem autonomamente a quantidade certa (e quando) uma plantação deve receber calor e água. O ArduFarmBot também permite a intervenção manual, tanto em forma local quanto remota via Internet, a fim de controlar o acionamento de uma bomba de água e de uma lâmpada elétrica, esta última para ser usada na geração de calor para as plantas.
O livro está dividido em 3 partes.
Na primeira parte, a partir do “Arduino Nano” de desenvolve uma versão tanto manual operada por botões, quanto automática do “ArduFarmBot”.

Na segunda parte, se aprofunda no projeto da automação e introduz a operação remota através da criação de uma página na internet. O “ESP8266-01” é utilizado para a conexão “Wifi”, enviando dados para o serviço especializado em IoT, “ThingSpeak.com“.

Na terceira parte, uma segunda versão do “ArduFarmBot” é desenvolvida, introduzindo o “NodeMCU ESP8266-12E”, um poderoso e versátil dispositivo para projetos em IoT, que substitui de forma integrada tanto o “Arduino Nano” quanto o “ESP8266-01”, utilizados nas partes anteriores do livro. Nesta última, se explora também uma nova plataforma de serviços do universo IoT, o “Blynk”.

Espero que gostem! E se preparem para o Tutoriais MJRoBot 2: “Brincando com robôs”.
Não deixem de visitar e seguir minha página: MJRoBot.org no Facebook
Saludos desde el sur del mundo!
Nos vemos em meu próximo post!
Obrigado e um abração,
Marcelo

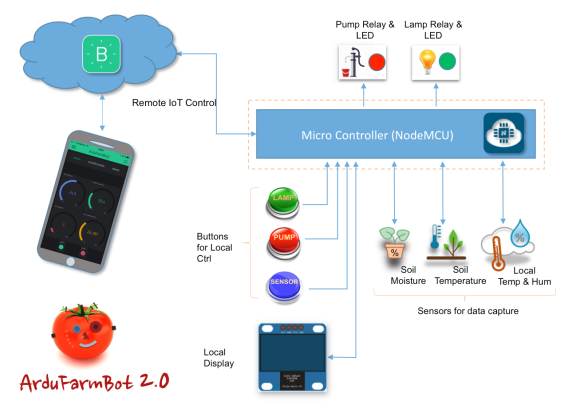
Algum tempo atrás, desenvolvemos aqui o projeto de um sistema de jardinagem totalmente automatizado: “ArduFarmBot: Controlando um tomateiro com a ajuda de um Arduino e Internet das coisas (IoT)“. As principais especificações originais serão mantidas nesta nova versão, o ArduFarmBot 2, porém agora o projeto será baseado nas plataformas de IoT: NodeMCU ESP8266 e BLYNK.
Com base em dados coletados de uma plantação qualquer tais como, temperatura e umidade, tanto do ar quanto do solo, o ArduFarmBot 2 decidirá a quantidade certa (e quando) o plantio deve receber calor e água. O sistema deverá também permitir a intervenção manual de um operador para controlar uma bomba de água e uma lâmpada elétrica para gerar calor para a plantação. Esta intervenção manual deverá ser possível de ser executada tanto no local como remotamente via Internet.
Em suma, o sistema deve receber como
A. ENTRADA
- Sensores:
- Temperatura do ar
- Umidade Relativa ao Ar
- Temperatura do solo
- Umidade do solo
- Botões:
- Bomba ON / OFF
- Lâmpada ON / OFF
B. SAÍDA:
- Atuadores:
- Relé para controle da bomba
- Relé para controle de lâmpada
- Mensagens automáticas devem ser enviadas na ocorrência de eventos, tais como:
- Bomba LIGADA
- Lâmpada LIGADA
- Sistema off-line
- Exibição de dados
- Todos os dados analógicos e digitais devem estar disponíveis para avaliação imediata
- Armazenamento de dados
- Dados históricos devem ser armazenados remotamente
O diagrama de blocos abaixo mostra os principais componentes do projeto.

Neste tutorial, aprenderemos a lidar com este fantástico dispositivo, o NodeMCU ESP-12E Development Kit V. 1.0, onde aprenderemos como:
- Fazer piscar um LED pela internet
- Ligar o ESP a um display LCD do tipo “OLED”
- Capturar dados gerados por sensores tanto analógicos como digitais
- Subir dados a um serviço de Internet das coisas tal como o Thinkspeak
- Controlar “coisas” pela internet, utilisando-se aplicativos para smartphones como o BLINK



