Can we “hear” a difference between pouring hot and cold water? Amazing proof-of-concept by a quick real deployment using Edge Impulse Studio

Introduction
A few months ago, my dear friend Dr. Marco Zennaro from ICTP, Italy, asked me if I heard that we humans could distinguish between hot and cold water only by listening to it. At principle, I thought that I was the one who did not listen to him well! 😉 But when he send me this paper: Why can you hear a difference between pouring hot and cold water? In an investigation of temperature dependence in psychoacoustics, I realized that Dr. Marco was pretty serious about it!
The first thing that called my attention reading the paper was the mention of this youtube video (please, watch the video and try it yourself before going on with the reading). Uaw! I could easily differentiate between the two different temperatures, only by the sound of water splashing in the cup (could you?) But why did this happen? The video mentioned that the change in the water splashing changes the sound that it makes because of various complex fluid dynamic reasons’. Not much explanation on this. Others say “that the viscosity changed with the temperature” or that it must be something with hot liquid tending to be more “bubbling.” Anyway, according to the paper’s researches, all of this is only speculation.
Besides the scientific investigation on it (what should be very interesting), the question that comes to us was: Is this ability of “listening temperatures” something replicable using Artificial Neural Networks? We did not know, but let’s try to create a simple experience using TinyML (Machine Learning applied to embedded devices).
Uaw! I could easily differentiate between the two different temperatures, only by the sound of water splashing in the cup (could you?) But why did this happen? The video mentioned that the change in the water splashing changes the sound that it makes because of various complex fluid dynamic reasons. Not much explanation on this. Others say that the viscosity changed with the temperature or that it must be something with hot liquid tending to be more bubbling. Anyway, according to the paper’s researches, all of this is only speculation.
Besides the scientific investigation on it (what should be very interesting), the question that comes to us was: Is this ability of listening temperatures something replicable using Artificial Neural Networks? We did not know, but let’s try to create a simple experience using TinyML (Machine Learning applied to embedded devices) and find the answer!
The Experiment
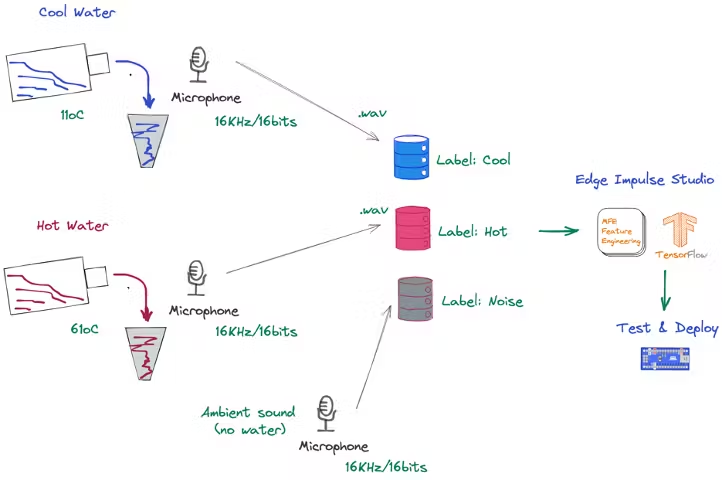
First, this is a simple proof-of-concept, so let us reduce the variables. Two similar glasses were used (same with the plastic recipient where the water was collected). The water temperatures were very different, with a 50oC range between them. (11oC and 61oC).
Each sample was around the time that the glass took to be filled (3 to 5 seconds).
Note that we were interested in capturing the sound of the water only during the pouring process.
The sound was captured by the same digital microphone (sampling frequency: 16KHz. Bit Depth: 16 Bits) and stored as.wav files in 3 different folders:
- Cold Water sound (“Cool”)
- Hot Water sound (“Hot”)
- No water sound (“Noise”).
The Cold Water label should be better defined as “cold” instead of “cool”, but once this is not a scientific paper, was cool leave it as ”cool” 😉
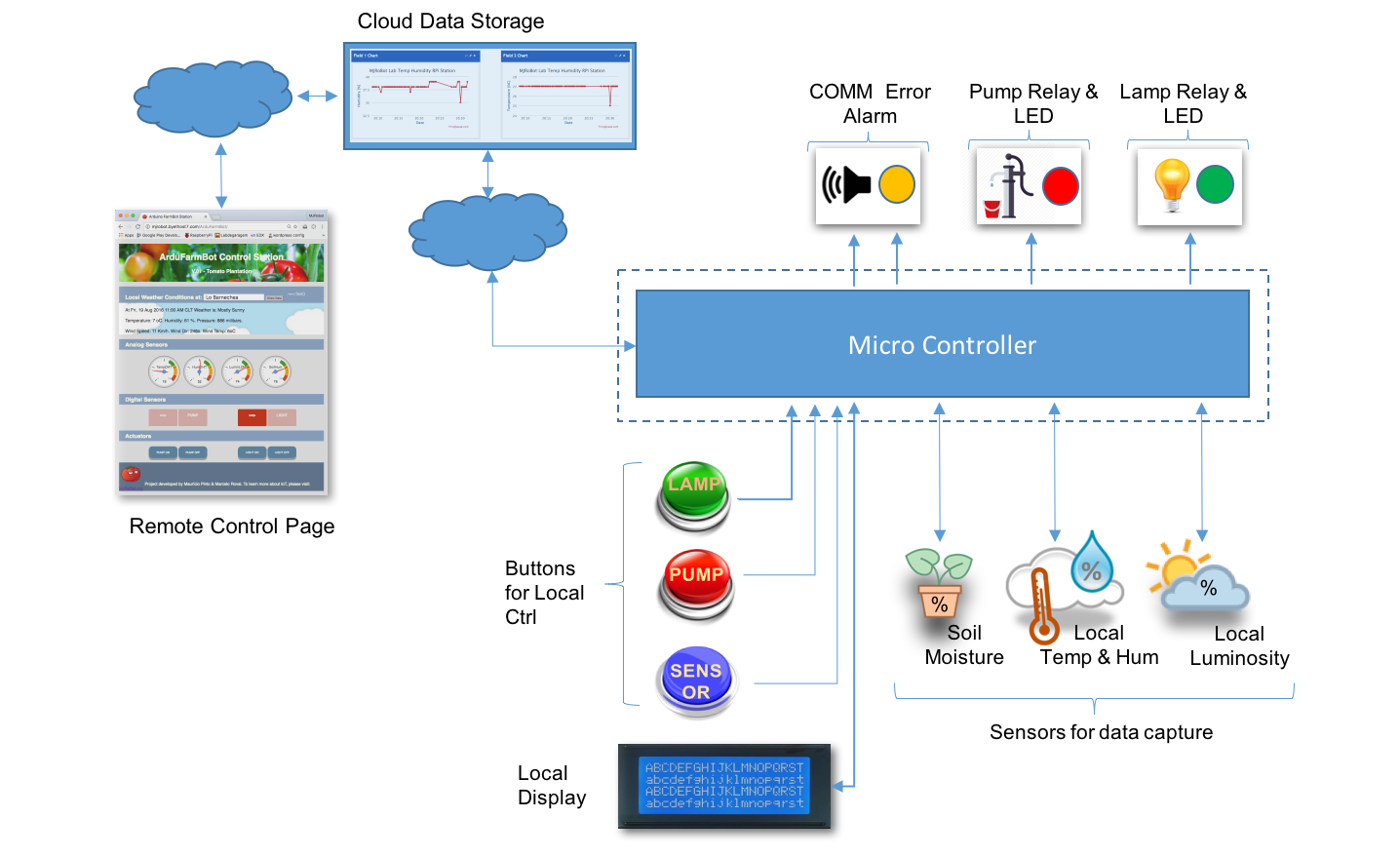
With the dataset captured, we uploaded it to Edge Impulse Studio, where the data were preprocessed, the Neural Network (NN) model was trained, tested, and deployed to an MCU for real physical test (an iPhone was also used for live classification).
Continue lendo…









 O vídeo abaixo mostra como ficará o projeto final:
O vídeo abaixo mostra como ficará o projeto final: