

This project shows how to emulate IoT devices and control them remotely by voice using Alexa.
Continue lendo...Arquivos para 30 30UTC November 30UTC 1999

Vamos brincar com o MicroPython em um ESP8266 (ou ESP32) utilizando o um Jupyter Notebook. A idéia é obter dados de sensores, agindo em um mundo físico diretamente do Jupyter.

1. Introdução
Em um artigo anterior publicado no Medium, explorei como controlar um Raspberry Pi usando-se do Jupyter Notebook: Computação Física Usando o Jupyter Notebook.
Foi uma ótima experiência, e uma vez que o projeto funcionou muito bem, pensei:
“Que tal testar também o Jupyter Notebook em um ESP8266 (ou mesmo no ESP32) usando como linguagem o MicroPython?”
Como sabemos, o Jupyter Notebook é um aplicativo Web de código aberto que permite criar e compartilhar documentos que contêm código ativo, equações, visualizações e texto narrativo. Os usos incluem limpeza e transformação de dados, simulação numérica, modelagem estatística, visualização de dados, aprendizado de máquina e muito mais. Para o “muito mais”, exploraremos a “Computação Física”.
Até agora em meus projetos, explorei IoT e computação física utilizando o ESP8266–01, ESP8266–12E (NodeMCU) e o ESP32, programados pelo IDE do Arduino, utilizando-se de sua linguagem C / C ++. Mas outra ótima linguagem que pode ser usada na programação desses dispositivos é o MicroPython:
O MicroPython é uma implementação enxuta e eficiente da linguagem de programação Python 3 que inclui um pequeno subconjunto da biblioteca padrão do Python e é otimizada para rodar em microcontroladores e em ambientes restritos. O objetivo é ser tão compatível com o Python normal quanto possível para permitir que você transfira código com facilidade do desktop para um microcontrolador ou sistema embarcado.
Além disso, acho que usar o Jupyter Notebook para programar um dispositivo ESP usando o MicroPython pode ser uma ótima ferramenta para ensinar Computação Física para crianças e também ajudar os cientistas a acessar rapidamente o mundo real utilizando-se de sensores na aquisição de dados.
Isso é o que tentaremos realizar neste tutorial:
- Saída de um sinal digital para ligar / desligar um LED
- Ler uma entrada digital (através de um botão)
- Saída de um sinal PWM para o controle do brilho de um LED
- Controlar a posição de um servomotor utilizando-se de uma saída PWM
- Leitura de sinal analógico (luminosidade) usando um LDR
- Leitura de temperatura via bus 1-Wire (DS18B20)
- Leitura de temperatura e umidade (DHT22)
- Exibir dados usando um OLED via barramento I2C.


Neste tutorial, capturaremos dados remotos como UV (radiação ultravioleta), temperatura e umidade do ar. Esses dados serão muito importantes e serão usados em uma futura Estação Meteorológica completa.
O diagrama de blocos mostra o que obteremos no final.


Meu tutorial publicado no site do Instructables.com: Alexa – NodeMCU: WeMo Emulation Made Simple, foi um dos vencedores na competição “Automation Contest 2017”.

Muito obrigado por todos os votos que o tutorial recebeu. É sempre uma grande honra saber que meu trabalho está sendo reconhecido e acima de tudo sendo executado em varias cantos do mundo! 😉
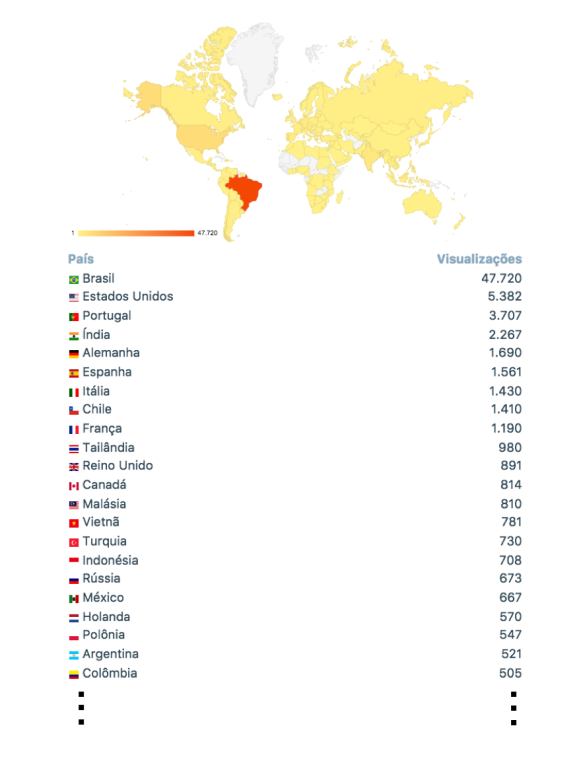
Fico muito feliz com este tipo de reconhecimento, pois mostra que estou no caminho certo com a decisão de escrever e compartilhar com a garotada e os velhos dinos, descobertas oriundas de minhas novas andanças pelos facinantes caminhos da eletrônica. A ideia era devolver ao mundo um pouquinho do muito que recebi, mas a cada vez que um garoto seja do Brasil, de Portugal, Índia, África, …. me escreve com uma dúvida ou agradecendo por um projeto meu, vejo que quem está recebendo algo mesmo, sou eu! 😉
Valeu moçada! Ah! O tutorial também pode ser visto em portugues aqui em meu blog:
Alexa – NodeMCU: Emulando um dispositivo WeMo

Outros premios recebidos por projetos publicados no site do Instructables:
Saludos desde el sur del mundo!
Até o próximo tutorial!
Obrigado
Marcelo


Alguns meses atrás, publiquei aqui um tutorial sobre o monitoramento de temperatura usando o DS18B20, um sensor digital que se comunica através de um barramento de um único fio (bus do tipo “1-wire”), sendo os dados enviados pela à internet com a ajuda de um módulo NodeMCU e o aplicativo Blynk:
O IoT feito simples: Monitorando a temperatura desde qualquer lugar
Mas o que passamos por cima naquele tutorial, foi uma das grandes vantagens desse tipo de sensor que é a possibilidade de coletar dados múltiplos, provenientes de vários sensores conectados ao mesmo barramento de 1 fio (“1-wire”). E agora é hora de também explorá-lo.

Vamos expandir o que foi desenvolvido no último tutorial, monitorando agora dois sensores DS18B20, configurados um em Celsius e outro em Fahrenheit (isto somente para explorar a biblioteca, poderiam ser os dois configurados para Celsius). Os dados serão enviados para uma aplicação Blynk, conforme mostra o diagrama de blocos acima.

Este post é na verdade uma continuação de meu último tutorial: Alexa – NodeMCU: Emulando um dispositivo WeMo, onde apresentamos a grande biblioteca fauxmoESP, a qual simplifica muito o código necessário para desenvolver projetos de automação envolvendo a Alexa e a emulação de dispositivos inteligentes utilizando o NodeMCU.
Neste novo tutorial, partiremos desse conceito (emulação de dispositivos WeMo), mas em vez de usar relés para ligar / desligar aparelhos elétricos, “ativaremos” funções mais complexas, onde múltiplos dispositivos estarão envolvidos.
Somente por diversão, simularemos o disparo de algumas armas encontradas na Star Trek Enterprise, tais como Photon Torpedos e Phasers!

O NodeMCU controlará um LED RGB, que será o nosso “Torpedo fotônico” e um LED vermelho nosso “Phaser”. Para dar um efeito mais realista, também incluiremos um Buzzer que gerará algum som junto com o efeito visual.
O diagrama de blocos abaixo mostra o projeto:
 No vídeo, voce terá uma idéia de como ficará o projeto final:
No vídeo, voce terá uma idéia de como ficará o projeto final:
No vídeo, voce terá uma idéia de como ficará o projeto final:

Este tutorial foi um dos vencedores do “Automation Contest 2017” do Instructables.com
Alguns meses atrás, explorei aqui como usar a Alexa, um assistente pessoal inteligente, popularizado pelo Amazon Echo e Echo-Dot, em projetos de automação residencial:
Quando o IoT encontra a Inteligência Artificial: Automação residencial com Alexa e NodeMCU
Alexa é capaz de interação de voz, reprodução de música, fazer listas de tarefas, configurar alarmes, podcasts de transmissão, reproduzir audiobooks e fornecer informações meteorológicas, de tráfego e outras informações em tempo real. A Alexa também pode controlar vários dispositivos inteligentes funcionando como um hub de automação residencial. Usaremos neste projeto, o “Echo-Dot”, que permite aos usuários ativar o dispositivo usando uma palavra de despertar, como “Alexa” ou “Computer”, como em “Star Trek !
No espaço da automação residencial, a Alexa pode interagir com vários dispositivos diferentes como Philips Hue, Belkin Wemo, SmartThings, etc. Em nosso caso, vamos emular o WeMo, usando a biblioteca fauxmoESP.
Esta é a principal diferença entre este tutorial e o anterior. A biblioteca fauxmoESP simplifica extremamente o código necessário para o desenvolvimento de projetos de automação residencial envolvendo a Alexa e o NodeMCU.
WeMo é uma série de produtos da Belkin International, Inc. que permite aos usuários controlar eletrodomésticos desde qualquer lugar. O conjunto de produtos inclui um interruptor, sensor de movimento, interruptor de luz, câmera e aplicativo.
O WeMo Switch (nosso caso aqui) pode ser conectado a qualquer tomada doméstica, a qual pode ser controlada a partir de um smartphone iOS ou Android o qual executará o aplicativo WeMo, via rede doméstica WiFi ou rede celular. Nós emularemos este dispositivo, mas seu controle será obtido por voz via o Echo-Dot.
O diagrama de blocos abaixo mostra o que será desenvolvido em nosso projeto:

O vídeo abaixo mostra como o projeto ficará no final:

Neste tutorial, exploraremos como controlar um servo através da Internet. Para isso, lançaremos mão de uma importante dupla de dispositivos no mundo do IoT:
o NodeMCU ESP12-E e o Blynk.
Começaremos por aprender como conectar um servo com o NodeMCU, como controlá-lo localmente com um potenciômetro, como ver sua posição em um display e finalmente como controlá-lo através da internet usando um smartphone.
O diagrama de blocos abaixo nos dá uma visão geral do projeto final.

E o vídeo, mostrará o projeto funcionando:

Em meu último tutorial: Controle ativado por voz com Android e NodeMCU, exploramos como desenvolver nossa própria App em um smartphone Android para controlar localmente (usando botões ou voz) dispositivos domésticos inteligentes. Que tal agora, em vez de dispositivos domésticos controlarmos motores? E melhor ainda, que tal ter esses motores movendo um robô? Pois isso, é exatamente o que desenvolveremos aqui, um robô controlado por voz via WiFi e utilizando como microcontrolador nosso velho amigo, o NodeMCU!
O diagrama de blocos abaixo nos dá uma geral sobre o projeto que desenvolveremos aqui:

e o filme nos mostra como ficará o projeto:
Por favor, considere que um de meus motores estava com muito pouco torque. Apesar de o resultado parecer estranho, o projeto funciona a contento. Assim que mudar o motor, atualizarei o vídeo. Obrigado.
Em meu último tutorial: Quando o IoT encontra a Inteligência Artificial: Automação residencial com Alexa e NodeMCU, exploramos como equipamentos ativados por voz como o Amazon Echo-Dot utilizando-se de um serviço da web (como o “Alexa”) podem controlar “dispositivos inteligentes” em nossas casas. Neste novo tutorial faremos o mesmo, porém em vez de usar o Alexa desenvolveremos nossa própria App em um smartphone Android controlando, tanto com botões quanto por voz, nossos dispositivos domésticos.
O diagrama de blocos nos dá uma geral do que pretendemos desenvolver:

e o filme nos mostra como ficará o projeto final:



