

IMPORTANTE: O apontador laser pode ser perigoso se apontado diretamente para os olhos. Proteja os seus olhos, o de animais e outras pessoas. Use com cuidado.
Abaixo, você poderá ver minha gatinha Cleo brincando com o laser:
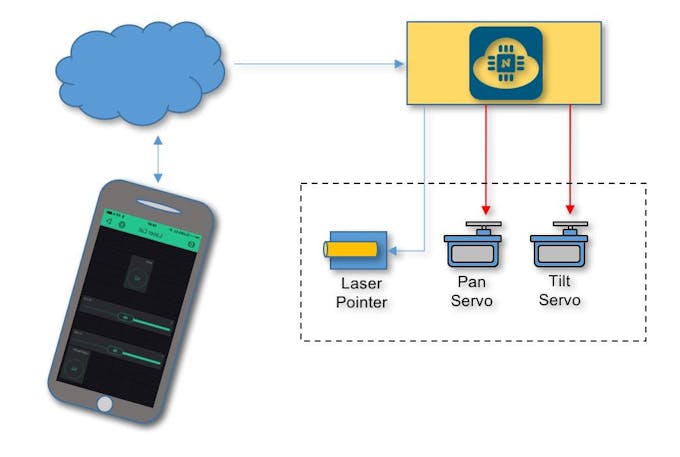
Step 1: Os componentes principais:
Step 2: O mecanismo “Pan/Tilt” de posicionamento
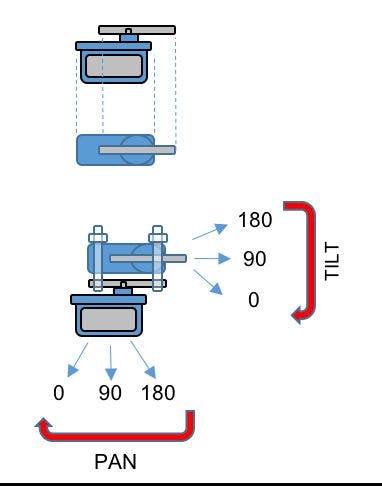
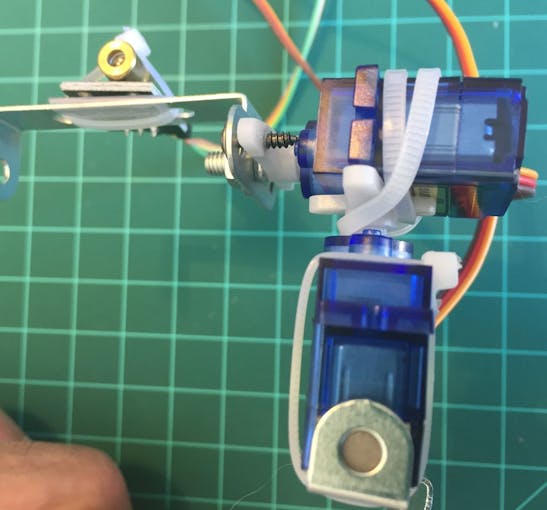
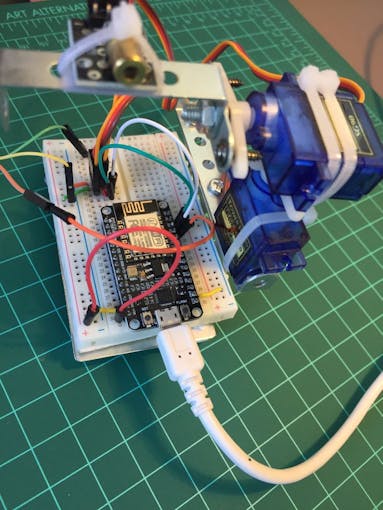
Vamos construir um mecanismo de “Pan / Tilt” muito simples, montando os servos “um em cima do outro” como mostrado nas fotos abaixo:
- O “Pan” Servo é usado “como base”. Mantenha-o na vertical.
- Fixe o “Tilt” Servo sobre a parte de movimento do “Pan” Servo (na posição horizontal)
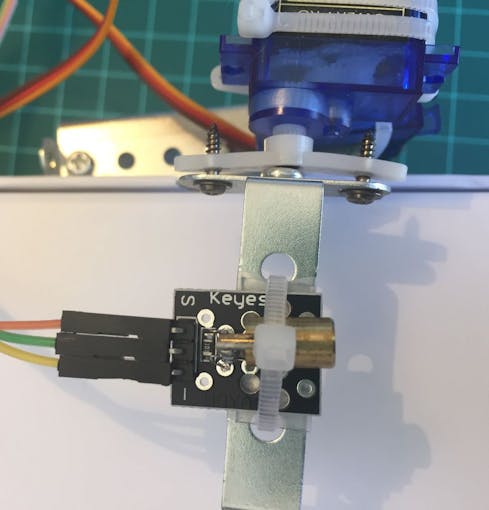
- Fixe o ponteiro laser na parte movel do “Tilt” Servo como mostrado.
Note que usei algumas peças metálicas, aproveitadas de um brinquedo desmontado, como estrutura de base para o mecanismo “Pan / Tilt”. Você poderá utilizar outros tipos de estrutura, O importante é manter os movimentos horizontal e vertical.
Step 3: O HW
O circuito elétrico é bem simples:
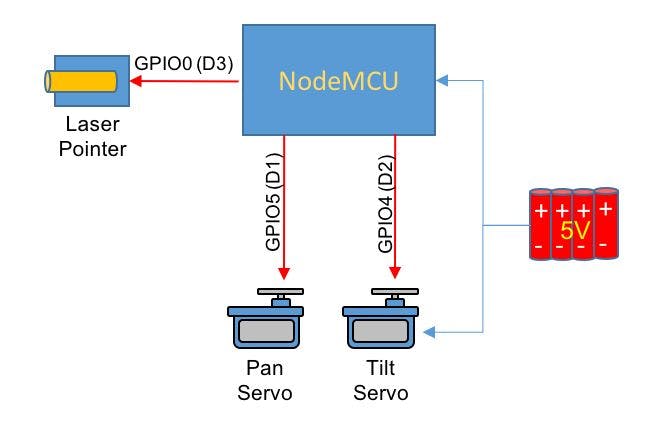 Antes de iniciar as conexões, leve em consideração que apesar do nodeMCU ser alimentado com 5V, ele funciona internamente com 3.3V (assim como seus pinos de I/O). Assim, os Servos não poderão ser alimentados a partir de uma das 3 saídas de 3.3V do NodeMCU. A exceção é o pino “Vin”, que pode tanto fornecer 5V para o breadboard “+ VCC rail”quanto alimentar o NodeMCU quando uma fonte externa é utilizada (como mostrado no diagrama elétrico abaixo).
Antes de iniciar as conexões, leve em consideração que apesar do nodeMCU ser alimentado com 5V, ele funciona internamente com 3.3V (assim como seus pinos de I/O). Assim, os Servos não poderão ser alimentados a partir de uma das 3 saídas de 3.3V do NodeMCU. A exceção é o pino “Vin”, que pode tanto fornecer 5V para o breadboard “+ VCC rail”quanto alimentar o NodeMCU quando uma fonte externa é utilizada (como mostrado no diagrama elétrico abaixo).
O módulo laser deve ser alimentado com 5V, porém ele também funciona com 3.3V o que faz com que a potência do laser seja menor e consequentemente, seu uso mais seguro.
IMPORTANTE: O apontador laser pode ser perigoso se apontado diretamente para os olhos. Proteja os seus olhos, o de animais e outras pessoas. Use com cuidado.
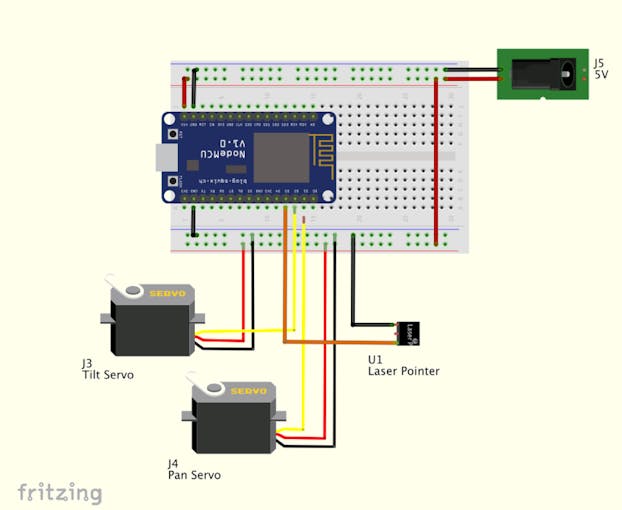
Observando atentamente o diagrama elétrico acima, execute as seguintes ligações:
- Ligue o cabo de dados do servo Pan (eixo X) ao NodeMCU Pin D1 (note que todos os pinos digitais do NodeMCU são PWM)
- Ligue os dados do servo Tilt (eixo “Y”) ao NodeMCU Pin D2
- Ligue o pino “S” do ponteiro laser ao NodeMCU Pin D3
- Ligue o pino “Vin” de NodeMCU ao “+ 5V Rail” do Breadboard
- Conecte os pinos GND (comum ou terra) do NodeMCU, Servos e Ponteiro Laser ao “GND Rail” do Breadboard
- Conecte os cabos de alimentação dos Servos ao “+ 5V Rail” do Breadboard
Step 4: O codigo
Para o controle dos servos, usaremos a biblioteca do IDE: Servo.h, a qual gerará sinais PWM posicionando-os facilmente com entradas angulares.
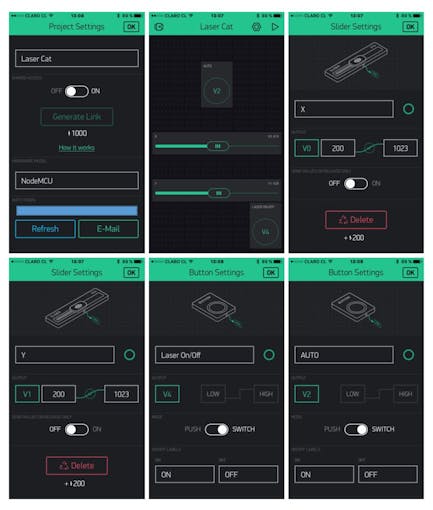
Uma vez que a base do projeto é usar o aplicativo BLYNK, o código torna-se muito simples. Devemos definir 4 variáveis virtuais:
V0: “X position”
V1: “Y position”
V2: “Random or manual” operation
V3: Laser ON/OFF command
BLYNK_WRITE(V0)
{
xPotReading = param.asInt();
}
BLYNK_WRITE(V1)
{
yPotReading = param.asInt();
}
BLYNK_WRITE(V2)
{
randState = param.asInt();
}
BLYNK_WRITE(V4)
{
laserState = param.asInt();
}
Se você não sabe como preparar o IDE do Arduino para trabalhar com o NodeMCU, por favor de uma olhadinha em meu tutorial:
Do “blink” ao BLYNK, uma viagem pela “Internet das coisas” nas asas do NodeMCU ESP-12E
Abaixo, o código completo. de uma passada de olhos nele. É muito fácil de entender.
Step 5: O “Blynk”
Step 6: Conclusão
Como sempre, espero que este projeto ajude outras pessoas a encontrar seu caminho no apaixonante mundo da eletrônica e do IoT!
Não deixe de visitar e seguir minha página: MJRoBot.org no Facebook
Um abraço e até o próximo post!
“Saludos desde el sur del mundo!” 😉
Obrigado
Marcelo





ola! Marcelo, I try to reproduce your project, bu I fail I try different ways to connect pins and servos bud didin’t work. With blynk i can switch laser but i can’t move servos, I try to wire in this way very similar as your images. https://www.circuito.io/static/reply/index.html?solutionId=5bd395b8c344f6002f88a623&solutionPath=storage.circuito.io can you help me? If you have any email I can sent you few pictures of my wiring board.
I try different ways to connect pins and servos bud didin’t work. With blynk i can switch laser but i can’t move servos, I try to wire in this way very similar as your images. https://www.circuito.io/static/reply/index.html?solutionId=5bd395b8c344f6002f88a623&solutionPath=storage.circuito.io can you help me? If you have any email I can sent you few pictures of my wiring board.
CurtirCurtir
Well, finally I fix that, both s9 doesn’t work I just put a new one and works fine! thanks!
CurtirCurtir