

o NodeMCU ESP12-E e o Blynk.
Começaremos por aprender como conectar um servo com o NodeMCU, como controlá-lo localmente com um potenciômetro, como ver sua posição em um display e finalmente como controlá-lo através da internet usando um smartphone.
O diagrama de blocos abaixo nos dá uma visão geral do projeto final.

E o vídeo, mostrará o projeto funcionando:
1. BoM (Lista de materiais)

Valores em USD, apenas para referência.
- NodeMCU ESP8266-12E V1.0 (US$ 8.79)
- 0.96″ Inch I2c IIC Serial 128×64 Oled LCD White Display (US$ 9.99)
- Mg995 Servo 180 Degree (US$ 19.99)
- Breadboard Power Supply Module 3.3V/5V (US$ 5.99)
- 10K ohms Potentiometer (US$ 7.19)
- 400 points Breadboard (US$ 5.89)
- Dupont Cables (US$ 7.29)
2. Conectando o servo e o potenciômetro

A primeira coisa que faremos é configurar o NodeMCU para lidar com o Servo, controlando-o através de um potenciômetro de 10K ohm.

Cuidado! O NodeMCU é alimentado com 5V, mas todos os seus GPIOs trabalham com um nível de 3.3V.
Dividiremos os barramentos de alimentação do Breadboard, deixando um para 5V e o outro para 3.3V. Para isso, usaremos uma fonte de alimentação específica para Breadboards como a mostrada no diagrama elétrico abaixo:

NOTA: Durante a fase de desenvolvimento (PC ligado à NodeMCU via porta USB), não é necessário ligar o pino Vin a + 5V (fio vermelho no diagrama), uma vez que a energia será fornecida pelo computador. Deixe-o desconectado.
Para o controle do servo, usaremos a biblioteca: Servo.h :
#include <Servo.h> // Include the library Servo servo1; // Name it "servo1" #define servo1Pin D2 // Define the NodeMCU pin to attach the Servo
Durante setup(), a variável servo1 deve ser iniciada:
servo1.attach(servo1Pin);
O potenciômetro de 10K funcionará como um divisor de tensão, alterando o nível da entrada analógica no NodeMCU (A0) de 0 a 3.3V. Internamente, o ADC de 10 bits (Conversor Analógico-Digital) gerará um valor digital correspondente (de 0 a 1023), armazenado na variável potReading, equivalente à entrada de tensão analógica.
potReading = analogRead(A0);
Devemos “mapear” esse valor digital, para que a saída digital modulada por largura de pulso (PWM) do pino D2 varie de 0 a 180 (variável servo1Angle).
servo1Angle = map(potReading, 0, 1023, 0, 180);
O servo girará de 0 a 180 graus, utilizando-se do comando abaixo:
servo1.write(servo1Angle);
A posição do Servo em graus será exibida, durante esta fase de teste, no Monitor Serial:
Serial.println(servo1Angle);
O codigo completo para os testes com o servo, poderá ser descarregado desde meu GitHub:
O vídeo abaixo mostra os testes sendo realizados com o servo:
3. Instalando um display

Esta bem utilizar o Serial Monitor durante os testes, mas o que acontecerá quando você estiver utilizando seu protótipo longe de seu PC em modo autônomo? Para isso, instalaremos um display do tipo OLED, o nosso velho conhecido: SSD1306, cujas principais características são:
- Tamanho da tela: 0.96 “
- Comunicação Serial I2C IIC SPI
- 128X64
- Display de caracteres na cor branca
Conecte os pinos do OLED ao NodeMCU, conforme descritos abaixo e no diagrama elétrico acima:
- SDA ==> D1 (5)
- SCL * ==> D2 (4) * Você também poderá encontrar “SDC” ao invés de SCL
- VCC ==> 3.3V ou 5V
GND ==> GND
O SSD1306 pode ser alimentado tanto com 5V quanto com 3.3V. Usaremos 3.3V fornecidos externamente para não sobrecarregar o NodeMCU.
Depois de conectar o OLED, deveremos baixar e instalar sua biblioteca no IDE do Arduino. Usaremos a biblioteca gráfica desenvolvida por Daniel Eichhorn. Entre no link abaixo e descarregue a biblioteca, instalando-a no IDE do Arduino:
https://github.com/squix78/esp8266-oled-ssd1306
Certifique-se de usar a versão 3.0.0 ou maior!
Depois de reiniciado o IDE, a biblioteca já deverá estar instalada.
A biblioteca suporta o protocolo I2C para acessar a modulo OLED, usando a biblioteca Wire.h:
#include <Wire.h> #include "SSD1306.h" SSD1306 display(ADDRESS, SDA, SDC);
Listaremos apenas algumas API mais importantes, as quais serão utilizadas com o OLED.
A lista completa poderá ser encontrada no GITHub fornecido anteriormente neste tópico.
A. Controle de exibição do display:
void init(); // Initialise the display void displayOn(void); // Turn the display on void displayOff(void); // Turn the display offs void clear(void); // Clear the local pixel buffer void flipScreenVertically(); // Turn the display upside down
B. Operações com texto:
void drawString(int16_t x, int16_t y, String text); // (xpos, ypos, "Text") void setFont(const char* fontData); // Sets the current font.
Fonts disponíveis:
- ArialMT_Plain_10,
- ArialMT_Plain_16,
- ArialMT_Plain_24

Uma vez que tenhamos instalado o OLED e sua biblioteca, devemos utilizar um programa simples para testá-lo. Digite o código abaixo em seu IDE, o resultado deverá ser como o mostrado na foto acima:
/*NodeMCU */
#include <ESP8266WiFi.h>
/* OLED */
#include "SSD1306Wire.h"
#include "Wire.h"
const int I2C_DISPLAY_ADDRESS = 0x3c;
const int SDA_PIN = 0;
const int SCL_PIN = 2;
SSD1306Wire display(I2C_DISPLAY_ADDRESS, SDA_PIN, SCL_PIN);
void setup ()
{
Serial.begin(115200);
displaySetup();
}
void loop()
{
}
/* Initiate and display setup data on OLED */
void displaySetup()
{
display.init(); // initialize display
display.clear(); // Clear display
display.display(); // Put data on display
Serial.println("Initiating Display Test");
display.setFont(ArialMT_Plain_24);
display.drawString(30, 0, "OLED"); // (xpos, ypos, "Text")
display.setFont(ArialMT_Plain_16);
display.drawString(18, 29, "Test initiated");
display.setFont(ArialMT_Plain_10);
display.drawString(10, 52, "Serial BaudRate:");
display.drawString(90, 52, String(11500));
display.display(); // Put data on display
delay (3000);
}
Se desejar, o codigo acima poderá ser descarregado de meu GitHub:
4. Mostrando a posição do servo no OLED

Agora “misturemos” os 2 códigos anteriores, assim poderemos não apenas controlar a posição do servo utilizando-se do potenciômetro, mas também ver sua posição na tela do OLED.
O código completo poderá ser baixado desde meu GitHub:
NodeMCU_Servo_Control_Test_OLED
E o resultado verificado no video abaixo:
5. Criando a App Blynk para o controle do servo

Basicamente, precisaremos alterar o código anterior, incluindo a parte referente ao Blynk mostrada a seguir:
#include <BlynkSimpleEsp8266.h>
char ssid [] = "YOUR SSID";
char pass [] = "YOUR PASSWORD";
char auth [] = "YOUR AUTH TOKEN"; // Servo Control Project
/* Reads slider in the Blynk app and writes the value to "potReading" variable */
BLYNK_WRITE(V0)
{
potReading = param.asInt();
}
/* Display servo position on Blynk app */
BLYNK_READ(V1)
{
Blynk.virtualWrite(V1, servo1Angle);
}
void setup ()
{
Blynk.begin(auth, ssid, pass);
}
void loop()
{
Blynk.run();
}
Deveremos definir um pino virtual V0, onde o Blynk irá “escrever” (ou “comandar”) a posição de servo, da mesma forma que fizemos com o potenciômetro. Na app do Blynk, usaremos um “Slider” (com saída definida de 0 a 1023) que usaremos para comandar a posição do servo.
Outro pino virtual, V1, será utilizado para “ler” a posição do servo, da mesma forma que fazemos com o OLED. Na app do Blynk, usaremos um “Display” (com saída definida de 0 a 180) onde mostraremos a posição do servo.
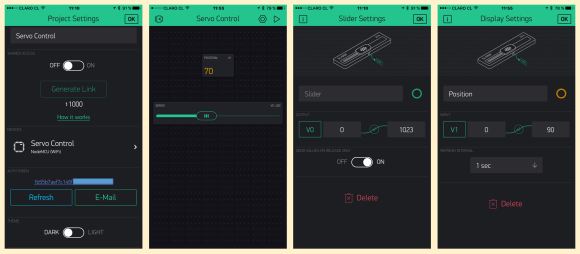
As fotos acima mostram as telas referents ao app do Blynk.
Voce poderá descarregar o programa complete desde meu GitHub:
6. Conclusão
Como sempre, espero que este projecto possa ajudar outros a encontrarem o seu caminho no emocionante mundo da electrônica, robótica e do IoT!
Visite o meu depositário de arquivos no GitHub para obter os arquivos atualizados:
Não deixem de visitar e seguir minha página: MJRoBot.org no Facebook
Saludos desde el sur del mundo!
Até o próximo post!
Obrigado
Marcelo





Fiz algumas alterações no proposito. coloquei o servo com um a pequena garra… vou testar de hoje para adiante. vou ignorar a leitura extrena ao celular e controle co o snob. vai ser somente nodemcu, celular e servo. vamos ver!
CurtirCurtir
can i use another type of servo such as sg-5010 plastic gear
CurtirCurtir